
Gamepadをブラウザでつかう その3(Arduino&タミヤカムプログラムロボット編)
前々回 はjavascriptでゲームパッドの入力の取得に成功し、 前回 はそいつをWebsocketでNodejsのサーバへ入力することに成功した。
最終回の今回は、そいつをさらにArduinoへ投入し、 別口 でつくっておいたタミヤカムプログラムロボットをゲームパッドからワイヤレスで制御することにする。
はじめに言い訳
なお、別口と申し上げたが、実はこの別口こそが本来の本筋であって本来このエントリは「タミヤ カムプログラムロボットを改造 その2」のはずであった。。
個人ブログで適当に書き進めていたせいか、二つのエントリの続きなのである。二つの記事からの続きなんて、雑誌などではあり得ないが まぁご容赦いただきたい。
作ったものの構成
結局こういう構成になった。
graph TD;
A[Android対応の無線Gamepad 端末をマウントできるもの];
B[Firefox on Android];
C[RPI Camera+mjpeg streamer];
D[node.js + Socket.IO];
E[Raspberry Pi Zero W];
F[USB on /dev/ttyACM0];
G[Arduino Leonard + Adafruit Motor Shield V2];
H[DC Motor of カムプログラムロボット];
A --> B
B --> C
B --> D
C --> E
D --> E
E --> F
F --> G
G --> H
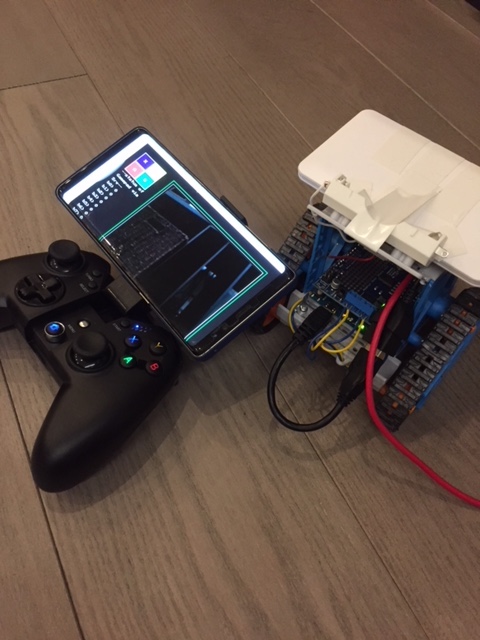
最初macにコントローラを繋いだのだが、有線なので未来感がなかったのか、いまいち息子の支持を得られなかった。。。
これではまずいということで、Android用のGamepadを購入した。最近は端末をマウントできるものがあって、これがあるとすごくロボットのコンソールっぽいのである。

案の定息子の心に火をつけることに成功。ただ、モバイルのChromeはGamepadAPIを未実装なのか動かなかったのでFirefoxを導入した。
① まずは開発環境作りから
以前、mac+XWindow経由でArduino IDEを使えるようにしたのでこれで開発をと考えていた。しかし、流石に遅くて辛い。さらにXQuartsに文字列をペーストするのもなかなかしっくりくる方法がなさそうなのでこれは見た目が派手なだけであった。なので早々に諦めた。
- かわりにこの記事のやり方でこういう構成をつくった
- vscode + sftpで手元のコードをRPIへ自動アップロード
- make uploadでArduinoにスケッチを叩き込む
- なお、Arduinoの他、ゲームパッドの入力を受けるのにnodejs+Socket.IO(WebSocket)を つかったが、その準備はこうすればいい
mkdir noderoot
cd noderoot
git clone https://github.com/creationix/nvm.git ~/.nvm
source ~/.nvm/nvm.sh
nvm install 8.9.4
npm install socket.io
npm install express
② 次に、カムロボットとか、カメラでの映像配信を準備する
タミヤ カムプログラムロボットを改造でやったように準備する。
③ プログラムを準備する<1:Gamepad->RPI>
ポイントは、ふたつ。
ひとつはゲームパッドの入力をどうやって楽にWebSocketでRPIへ突っ込むかということ。いくらWebSocketとはいえ、ボタン一つ一つの入力を送りあってたらキュー制御みたいなことが必要になりそうだ。ということで、JSONをつくって、それをnodejsでParseすることにする。
こういう風にJSONをクライアント側でつくって
function pickGPtoJSON(gp){
var bi;
var json = {};
for( bi=0; bi < gp.buttons.length; bi++ ){
json["b"+bi] = gp.buttons[bi].value;
}
for( bi=0; bi < gp.axes.length; bi++ ){
json["a"+bi] = gp.axes[bi];
}
return json;
}
nodejs側でこういう風にParseする
var parsedGP = JSON.parse(gp);
JSONをすんなり作る方法がなかなか検索してもなかったが、この 方々の記事がわかりやすく助かった。
- http://kazumarr.hatenablog.com/entry/javascript_
- https://www.digitalocean.com/community/tutorials/how-to-work-with-json-in-javascript
③ プログラムを準備する<2:RPI->Arduino>
ふたつめのポイントは、nodejsが受け取ったゲームパッドをどうやってArduinoが溢れないように渡してやるかである。
ゲームパッドの入力は60fps出せるrAF(requestAnimationFrame) +WebSocketでガンガンRPIに突っ込まれる。これに対しRPI->Arduinoはシリアル通信、つまり9600bps=1.2byte/milsec くらいなのである。
どう考えても真っ正直に突っ込むと通信が間に合わないので、2つの作戦を考えた
- RPI->Arduinoへのデータ投入にはインターバル(100msecにした)を入れる
- RPI->Arduinoへのデータ投入はゲームパッドの入力を1byteにまとめて文字列ではなくビットフィールドで入れる
つまりこういう感じにする。1Byteのバイト型の変数を作りボタンが押されてたらOR演算でビットを立てていくわけである。それを最低100msecまってから投入してゆく。 (OR演算などと偉そうに書いたが、砂場で棒を並べるのと本質的には同じ操作である。。。)
function buildByteGP(gp){
/*
[bit assignment]
FORWARD -> 1000 0000 -> 0x80
BACKWARD -> 0100 0000 -> 0x40
LEFT -> 0010 0000 -> 0x20
RIGHT -> 0001 0000 -> 0x10
STOP -> 0000 0001 -> 0x01
[gamepad key assignment]
a1 -->> -: forward, +:backward
a2 -->> -: left, +:right
b6+b7-> FORCE STOP
*/
var buf = new Buffer(1);
var parsedGP = JSON.parse(gp);
buf[0] = 0x00;
if ( parsedGP.a1 <= -0.8 ) {
buf[0] = buf[0] | 0x80;
} else if( parsedGP.a1 >= 0.8 ) {
buf[0] = buf[0] | 0x40;
}
if ( parsedGP.a2 <= -0.8 ) {
buf[0] = buf[0] | 0x20;
} else if( parsedGP.a2 >= 0.8 ) {
buf[0] = buf[0] | 0x10;
}
//Force STOP
if ( (parsedGP.b6 == 1) & (parsedGP.b7 == 1) ){
buf[0] = 0x01;
}
return buf;
}
socket.on('gpFromClient', function(msg){
var buf;
io.emit('gpFromSrv', msg);
if ( (Date.now() - last) >= interval ){
last = Date.now();
buf = buildByteGP(msg)
console.log("-> emit:" + last + ">" + buf.toString('hex'));
sp.write(buf);
}
});
なお、Byte列をnodejsで作る方法は、StackoverflowのこちらのQ&Aがわかりやすかった
④ プログラムを準備する<3:ArduinoでSerialから値受け取りと、DCモーター制御>
正直、DCモータの制御は酷い感じがする。ので特に解説はできないが ひとまずは速度を示すdrive/drive2が正ならば前に進むようにまわし 負ならば後ろに進むように回す。
これをSerialからの入力に応じて、前・後・右回転・左回転 になるようにやったつもりだがなにか根本的に間違っている気がする。
前後回転も一応できるのだが、思った通りではない。 ここは継続調査するがひとまず、動かして先へ進む。
Serialからの値の取り出しはnodejsの時とは逆に AND演算で取り出していけばいい。
void loop() {
uint8_t in = false;
//Retrieve Gamepad info from Raspberry Pi
if (Serial.available()>0) {
in = Serial.read();
Serial.flush();
if( in ){
Serial.write(drive);
Serial.write(drive2);
gp = in;
in = false;
}
}
//Calc. each DC motor speed
// based on bit assignment of Gamepad.
/*
[bit assignment]
FORWARD -> 1000 0000 -> 0x80
BACKWARD -> 0100 0000 -> 0x40
LEFT -> 0010 0000 -> 0x20
RIGHT -> 0001 0000 -> 0x10
STOP -> 0000 0001 -> 0x01
[gamepad key assignment]
a1 -->> -: forward, +:backward
a2 -->> -: left, +:right
b6+b7-> FORCE STOP
*/
if( gp & 0x80 ){ //FORWARD
if( drive < 127 ){ drive++; }
if( drive2 < 127 ){ drive2++; }
}
if( gp & 0x40 ){ //BACKWARD
if( drive > -127 ){ drive--; }
if( drive2 > -127 ){ drive2--; }
}
if( gp & 0x20 ){ //RIGHT
if( drive > -127 ){ drive--; }
if( drive2 < 127 ){ drive2++; }
}
if( gp & 0x10 ){ //LEFT
if( drive < 127 ){ drive++; }
if( drive2 > -127 ){ drive2--; }
}
if( gp & 0x01 ){ //FORCE STOP
drive = 0;
drive2 = 0;
}
//and just RUN.
runM();
delay(5);
}
⑤ プログラムを準備する<4:mjpeg-streamerの表示>
上記までで制御部分はできた。最後に、カメラ映像を表示するために、 port:9000でmjpeg-streamerが待ち受けている。
これをport:3000で動く自作のコンソールに統合する必要がある。本来なら単純にimgタグ+相対Pathで読み込めばいいのだが、別Portなので相対Pathがつかえない。なので、imgタグを準備した上で、javascriptで定期的に読み込んでやることにする。こんな風に
<script>
function loadMjpgImg(){
$("#camera").attr('src',"http://"+location.hostname+":9000/?action=snapshot");
}
$(document).ready(function() {
lp2 = setInterval(loadMjpgImg, 200);;
});
</script>
<img style="width:640px;height:480px;" id="camera" src="" />
⑥ いよいよ組み合わせる時が来た
起動用バッチを準備し、起動する。このstart.shは/etc/rc.localに追記しておき 起動したら勝手に立ち上がるようにしておく。
#!/bin/bash
mjpg_streamer -i "input_raspicam.so -fps 10 -q 10 -x 640 -y 480" -o "output_http.so -p 9000 -w /home/pi/operations/mjpg-streamer/www" &
/home/pi/.nvm/versions/node/v8.9.4/bin/node /home/pi/operations/noderoot/DCconsoleSrv.js &
AndroidにFirefoxを入れ、Bluetoothのゲームパッドを接続してからFirefoxでhttp://RPIのポート:3000にアクセスすればこういうふうに動かせる。
https://www.youtube.com/embed/qTPEKqwHLSE
感想
正直、ロボットの制御がこんなに面白いものだとは知らなかった。たくさんの技術者がロボットの道に進むわけである。とにかく動かしているだけで楽しい。 そして、その実装はわずかな半田付けと、Web/サーバ運用の技術、それから「はじめてのC」レベルの実装でいける世の中になっているのである。私のようなフルスタックと言うか寄せ集めのゴミスタックエンジニアでも十分に遊べる。いい世の中になったもんだ。
なお、はじめにArduino Leonardo, Adafruit Motor Shield V2を買ってから構成を考えたので、随分とGamepadとのの接続部分を回りくどくしてしまった、と途中で後悔もした。 WebSocket on ブラウザ + Nodejs on RPI + Serialの3つも噛ませてあるのだ。
しかし、終わってみればリアルタイム入力をうまく高速かつ柔軟なRPI側でさばき、適度に加減してArduinoに渡せる構成なのではないか、もしかしたらカメラ入力を機械学習@クラウド側に渡してもっと素敵なことができるのではないか、など拡張性もある構成なのではないかと、自画自賛しておこう。
Appendix. コード全部
DCconsoleSrv.js
var app = require('express')();
var http = require('http').Server(app);
var io = require('socket.io')(http);
var SerialPort = require('serialport');
var sp = new SerialPort('/dev/ttyACM0', {
baudRate: 9600,
dataBits: 8,
parity: 'none',
stopBits: 1,
flowControl: false
});
var interval = 100; //ms
var last = Date.now();
function buildByteGP(gp){
/*
[bit assignment]
FORWARD -> 1000 0000 -> 0x80
BACKWARD -> 0100 0000 -> 0x40
LEFT -> 0010 0000 -> 0x20
RIGHT -> 0001 0000 -> 0x10
STOP -> 0000 0001 -> 0x01
[gamepad key assignment]
a1 -->> -: forward, +:backward
a2 -->> -: left, +:right
b6+b7-> FORCE STOP
*/
var buf = new Buffer(1);
var parsedGP = JSON.parse(gp);
buf[0] = 0x00;
if ( parsedGP.a1 <= -0.8 ) {
buf[0] = buf[0] | 0x80;
} else if( parsedGP.a1 >= 0.8 ) {
buf[0] = buf[0] | 0x40;
}
if ( parsedGP.a2 <= -0.8 ) {
buf[0] = buf[0] | 0x20;
} else if( parsedGP.a2 >= 0.8 ) {
buf[0] = buf[0] | 0x10;
}
//Force STOP
if ( (parsedGP.b6 == 1) & (parsedGP.b7 == 1) ){
buf[0] = 0x01;
}
return buf;
}
app.get('/', function(req, res){
if(req.url == '/favicon.ico'){
return;
}
res.sendFile(__dirname + '/DCconsole.html');
});
io.on('connection', function(socket){
console.log('[user connected]');
socket.on('disconnect', function(){
console.log('[user disconnected]');
});
socket.on('gpFromClient', function(msg){
var buf;
io.emit('gpFromSrv', msg);
if ( (Date.now() - last) >= interval ){
last = Date.now();
buf = buildByteGP(msg)
console.log("-> emit:" + last + ">" + buf.toString('hex'));
sp.write(buf);
}
});
});
sp.on('data', function(msgFromA){
var buf = new Buffer(msgFromA);
console.log(' <- data from Arduino+: ' + buf.toString('hex') );
});
http.listen(3000, function(){
console.log('listening on *:3000');
});
DCconsole.html
<!DOCTYPE html>
<html>
<head>
<meta charset="utf-8">
<script src="/socket.io/socket.io.js"></script>
<script type="text/javascript" src="http://ajax.googleapis.com/ajax/libs/jquery/2.1.0/jquery.min.js"></script>
<style>
@import url('https://fonts.googleapis.com/css?family=Press+Start+2P');
body{
color: rgba(255,255,255,.75);
font-family: 'Press Start 2P', cursive;
background-color: rgb(25,25,25);
font-size: 1.0em;
padding: 2.0em;
line-height: 1.8rem;
}
.buttons{
}
.button{
background-color: #4CAF50;
border:rgba(255,255,255,.75) solid;
color: white;
padding: 15px 32px;
text-align: center;
text-decoration: none;
display: inline-block;
font-size: 16px;
}
.bb {
background-color: rgb(39, 28, 192);
}
.by {
background-color: rgb(241, 255, 44);
border-top:rgba(255,255,255,.75) solid;
}
.br {
background-color: rgb(247, 68, 68);
}
.bg {
background-color: #4CAF50;
}
.parent {
display: flex;
justify-content:left;
}
.child1{
width: 1000px;
}
.child2 {
border: rgb(248, 45, 45) solid;
border: #4CAF50 solid;
padding:10px;
font-size: 90%;
}
form input {
color: rgba(255,255,255,.75);
font-family: 'Press Start 2P', cursive;
background-color: rgb(25,25,25);
font-size: 1.0em;
padding: 2.0em;
line-height: 1.8rem;
border: 0; padding: 10px;
border-top:rgba(255,255,255,.75) solid;
border-left:rgba(255,255,255,.75) solid;
border-bottom:rgba(255,255,255,.75) solid;
}
form button {
color: rgba(255,255,255,.75);
font-family: 'Press Start 2P', cursive;
background-color: rgb(224, 34, 81);
font-size: 1.0em;
padding: 2.0em;
line-height: 1.8rem;
border: 0; padding: 10px;
border-top:rgba(255,255,255,.75) solid;
border-right:rgba(255,255,255,.75) solid;
border-bottom:rgba(255,255,255,.75) solid;
}
</style>
</head>
<body>
<script>
function setMessage(selector,text) {
$(selector).html(text);
}
function addMessage(selector,text) {
$(selector).html($(selector).html()+"<br/>"+text);
}
function invertColors(elem) {
var color = $(elem).css('color');
$(elem).css('color') = $(elem).css('background-color');
$(elem).css('background-color') = color;
}
function pickGPtoJSON(gp){
var bi;
var json = {};
for( bi=0; bi < gp.buttons.length; bi++ ){
json["b"+bi] = gp.buttons[bi].value;
}
for( bi=0; bi < gp.axes.length; bi++ ){
json["a"+bi] = gp.axes[bi];
}
return json;
}
function loadMjpgImg(){
$("#camera").attr('src',"http://"+location.hostname+":9000/?action=snapshot");
}
function mainLoop(){
var bi;
var gp = navigator.getGamepads()[0];
if (gp) {
socket.emit('gpFromClient', JSON.stringify(pickGPtoJSON(gp)));
}
lp = raf(mainLoop);
}
var gp = false;
var lp;
var raf = window.requestAnimationFrame || window.mozRequestAnimationFrame || window.webkitRequestAnimationFrame || window.msRequestAnimationFrame;
var rafS = window.mozCancelRequestAnimationFrame || window.webkitCancelRequestAnimationFrame || window.cancelRequestAnimationFrame;
var lp2;
var socket;
var parsedMsg;
$(document).ready(function() {
window.addEventListener("gamepadconnected", function(e) {
gp = navigator.getGamepads()[e.gamepad.index];
addMessage("#console","[NAME:"+ gp.id +"], [# OF BUTTONS:"+gp.buttons.length+"], [# OF AXES:"+gp.axes.length+"]");
mainLoop();
});
window.addEventListener("gamepaddisconnected", function(e) {
gp = false;
addMessage("#console","connection terminated");
rafs(lp);
});
socket = io();
socket.on('gpFromSrv', function(msg){
var bi;
parsedMsg = JSON.parse(msg);
setMessage("#status","--status of Gamepad via Srv--")
Object.keys(parsedMsg).forEach(function (key) {
addMessage("#status", key + "> " + parsedMsg[key] );
});
});
lp2 = setInterval(loadMjpgImg, 200);;
});
</script>
<div class="parent">
<div class="child1">
<div class="buttons">
<span id="btnX" class="button bb">X</span><span id="btnX" class="button by">Y</span><span id="btnX" class="button br">A</span><span id="btnX" class="button bg">B</span>
</div>
<span id="status">---status-------<br/>
b:0> -:-<br/></span>
</div>
<div class="child2">
<img style="width:640px;height:480px;" id="camera" src="" />
<form id="frmMes" action="">
<input id="m" autocomplete="off" /><button>Send</button>
</form>
<span id="console">console<br/>------------------------------------<br/></span>
</div>
</body>
</html>
DCmotorCtrl.ino
#include <Wire.h>
#include <Adafruit_MotorShield.h>
Adafruit_MotorShield AFMS = Adafruit_MotorShield();
Adafruit_DCMotor *myMotor = AFMS.getMotor(1);
Adafruit_DCMotor *myMotor2 = AFMS.getMotor(2);
int8_t drive = 0; //stop state
int8_t drive2 = 0; //stop state
uint8_t gp = false;
void runM(){
uint8_t t;
if( drive == abs(drive) ){
myMotor->run(FORWARD);
}else{
myMotor->run(BACKWARD);
}
if( drive2 == abs(drive2) ){
myMotor2->run(FORWARD);
}else{
myMotor2->run(BACKWARD);
}
t=abs(drive) *2; myMotor->setSpeed(t);
t=abs(drive2)*2; myMotor2->setSpeed(t);
//myMotor->run(RELEASE);
//myMotor2->run(RELEASE);
}
void setup() {
Serial.begin(9600);
AFMS.begin();
}
void loop() {
uint8_t in = false;
//Retrieve Gamepad info from Raspberry Pi
if (Serial.available()>0) {
in = Serial.read();
Serial.flush();
if( in ){
Serial.write(drive);
Serial.write(drive2);
gp = in;
in = false;
}
}
//Calc. each DC motor speed
// based on bit assignment of Gamepad.
/*
[bit assignment]
FORWARD -> 1000 0000 -> 0x80
BACKWARD -> 0100 0000 -> 0x40
LEFT -> 0010 0000 -> 0x20
RIGHT -> 0001 0000 -> 0x10
STOP -> 0000 0001 -> 0x01
[gamepad key assignment]
a1 -->> -: forward, +:backward
a2 -->> -: left, +:right
b6+b7-> FORCE STOP
*/
if( gp & 0x80 ){ //FORWARD
if( drive < 127 ){ drive++; }
if( drive2 < 127 ){ drive2++; }
}
if( gp & 0x40 ){ //BACKWARD
if( drive > -127 ){ drive--; }
if( drive2 > -127 ){ drive2--; }
}
if( gp & 0x20 ){ //RIGHT
if( drive > -127 ){ drive--; }
if( drive2 < 127 ){ drive2++; }
}
if( gp & 0x10 ){ //LEFT
if( drive < 127 ){ drive++; }
if( drive2 > -127 ){ drive2--; }
}
if( gp & 0x01 ){ //FORCE STOP
drive = 0;
drive2 = 0;
}
//and just RUN.
runM();
delay(5);
}